산업 제조는 경제 및 사회 발전 촉진에 중요한 연결 고리입니다. 현재 자동 용접 장비에 대한 연구가 활발히 진행되고 있으며, 특히 다양한 용접 구조물 제작에 널리 사용되고 있습니다.
자동 용접 공정에서는 용접 조립 간격 오차를 일정 정도 지능적이고 디지털 방식으로 합리적으로 제어하며, 이를 바탕으로 공작물 위치 차이, 공작물 접합부 편차 등 여러 요소를 고려합니다. 따라서 레이저 용접 이음매 추적 기술은 용접 공정에서 중요한 역할을 합니다.
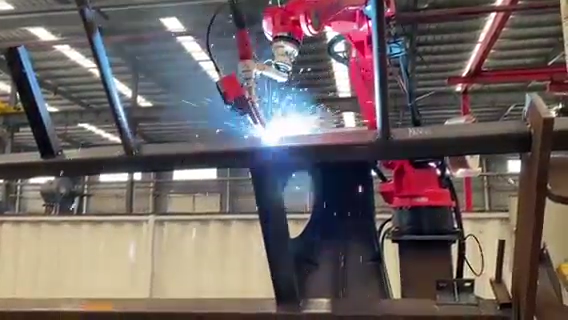
시멘트 탱크 차량 차량 베이스 용접 7축 지구 궤도 8축 회전 레이저 용접
- 작업물의 위치가 크게 다르다
- 공작물 연결부에 편차가 존재합니다.
- 높은 용접 정확도가 요구됨
- 용접 환경이 좋지 않고 연기가 많이 난다
이 경우, Yooheart 지능형 로봇 HY1006A-145는 높은 유연성, 안정성 및 신뢰성을 갖춘 레이저 용접 솔기 추적 시스템을 갖춘 용접에 사용됩니다.
매 용접 전에 장비는 먼저 용접 이음 위치 지정을 통해 용접 이음의 좌표를 스캔하고 기록한 다음, 내부 알고리즘으로 좌표 오프셋을 계산하고 참조 좌표 매개변수를 실제 시간에 넣어 실제 시간 편차를 보정하여 용접 후 제품의 밀봉 및 무결성을 보장합니다.
"4점 교집합" 방법
누구나 알다시피 두 점은 직선을 결정하지만, 공작물 조립체는 각도를 형성합니다. 기존 알고리즘으로는 그 위치를 결정할 수 없으므로 4시 방향에서 "교차"하는 방법을 사용해야 합니다. 두 선이 교차하면 교차점이 생기고, 특수 알고리즘은 알려진 4점의 좌표를 결정하여 교차점의 좌표 위치를 계산하여 용접 목적을 달성합니다.

레이저 솔기 추적 시스템
레이저 용접 이음매 추적 시스템은 주로 레이저 센서와 모니터링 단말기로 구성됩니다. 레이저 센서는 용접 이음매 정보를 능동적으로 수집하고 실시간으로 처리하며, 산업용 로봇과 실시간 통신을 유지합니다. 모니터링 단말기는 센서를 모니터링하고 설정합니다. 또한, 지능형 용접의 요구를 충족하기 위해 용접 전 위치 추적, 추적 및 스캐닝 기능을 갖추고 있습니다.
작동 원리: 용접 이음부 스캐닝, 포인트 클라우드 이미지 피팅, 알고리즘이 특징점을 정확하게 식별하고, 계산 결과의 실시간 데이터를 로봇으로 전송하여 제어 지침으로 삼고, 로봇 작동을 수정하거나 안내합니다.
골판지 솔루션

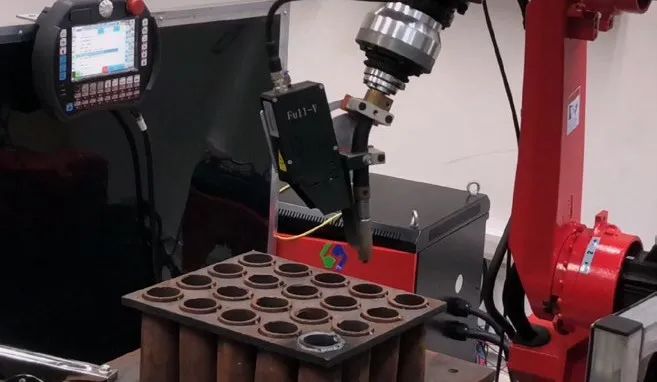
원형 구멍 자동 플러그 용접 솔루션

원형 솔기 솔루션

튜브 플레이트 솔루션
Yunhua Intelligent는 신속한 배치, 안전하고 효율적인 자동화 솔루션 및 실시간 시스템 솔루션을 제공할 수 있습니다. 레이저 비전 용접 이음매 추적 시스템을 통해 용접 로봇은 실시간 용접 이음매 위치 지정 및 추적을 실현하고 용접 공정에서 용접 이음매 오프셋에 따라 용접 궤적을 수정하여 진정한 지능형 용접을 실현합니다.
게시 시간: 2022년 4월 9일



