로봇 용접의 용접 효과는 여러 측면의 영향을 받습니다. 많은 고객이 용접 로봇 사용에 익숙해지기 전에 어느 정도 문제를 겪게 됩니다. 이러한 문제는 기본적으로 부적절한 작동이나 로봇 설정으로 인해 발생하며, 적절한 조정을 통해 해결할 수 있습니다. 이어서 편집자가 Yunhua 용접 로봇 사용 시 자주 발생하는 몇 가지 문제와 관련 솔루션을 살펴보겠습니다.
1. 용접 중 아크 스타팅 실패
1. 아크는 아직 시작되지 않았습니다
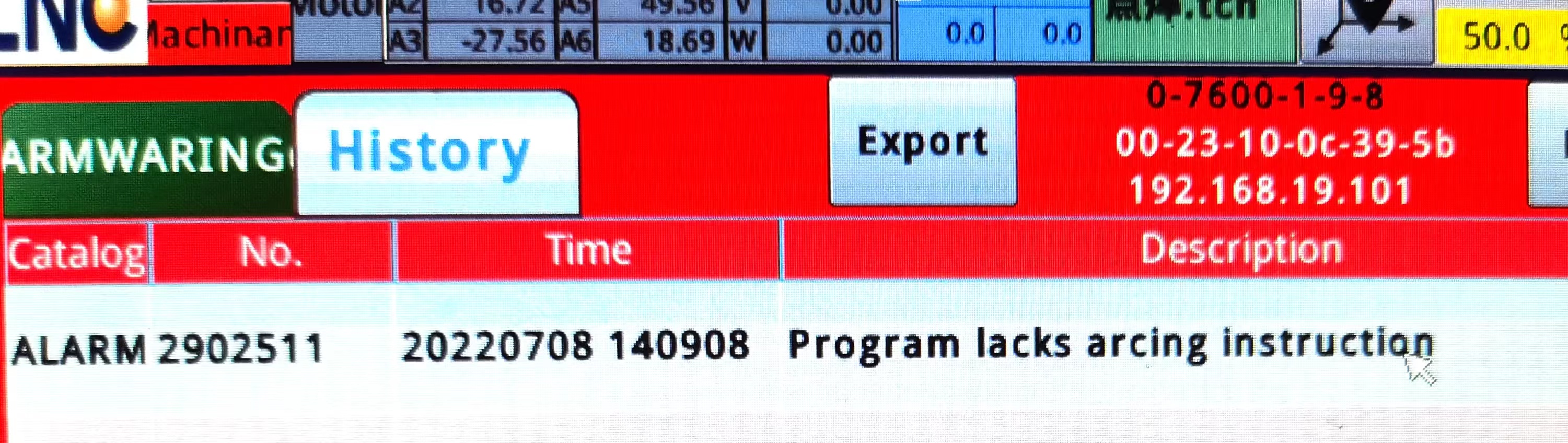
사유: 편집된 프로그램에서 아크 종료 명령을 실행하기 전에 해당 아크 시작 명령이 없습니다.
처리방법 : 아크 종료 명령을 하나 더 추가할지, 아크 시작 명령을 하나 줄일지 체크
2. 아크 시작 실패, 신호 감지가 잘못되었습니다.
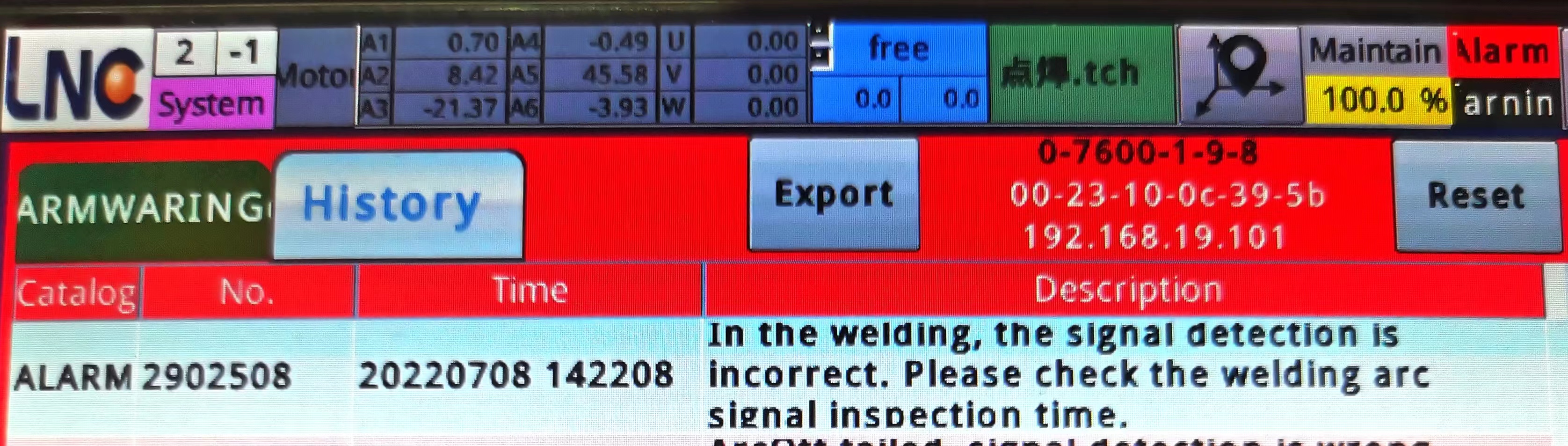
접근하다:
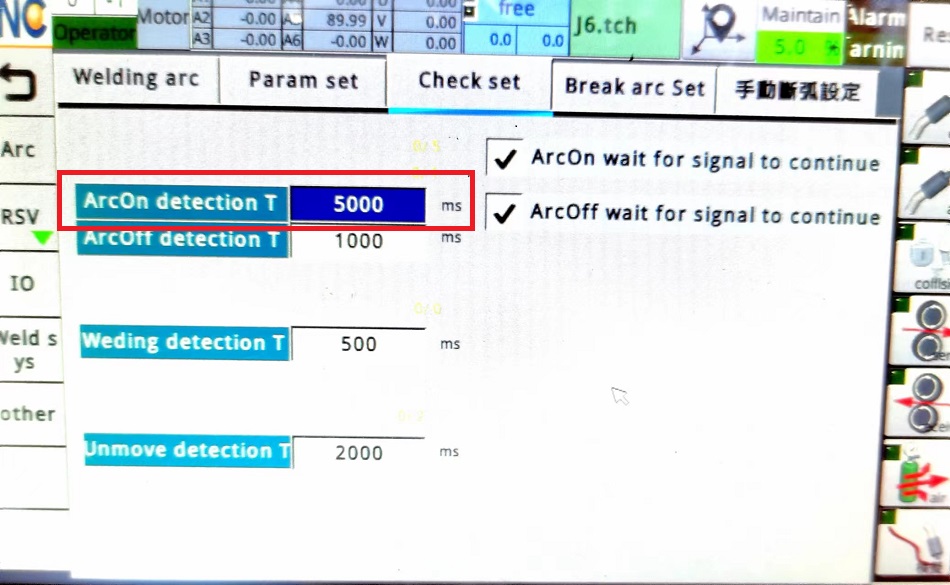
1) 파라미터 페이지에서 용접 중단 시간 설정을 확인하세요. 일반적으로 5000ms로 설정하는 것이 좋습니다.
2) 용접기 신호가 시스템에 정상적으로 전송되는지 확인
3) 작업물이 접지되어 있는지 확인하세요
3. 아크 프라이드 와이어
이유:
1) 전류 및 전압 불일치
가공방법 : 실제 작업물의 두께와 용접기에 따라 적절한 전류와 전압을 설정해야 합니다.
2) 용접 와이어의 길이가 너무 길다
처리방법 : 일반적으로 용접와이어의 길이는 용접와이어 직경의 10~15배로 하며, 용접와이어 직경에 따라 적절한 용접와이어 길이를 선택합니다.

전류가 너무 적으면 용접이 고르지 않게 됩니다.

정상적인 전류 및 전압, 아름답고 견고한 용접

용접 토치의 끝은 와이어를 뭉치게 만듭니다.

정상용접 후 용접토치 끝선은 양호한 상태입니다.
4. 아크 발생 후 자동 아크 소호 현상이 발생한다.
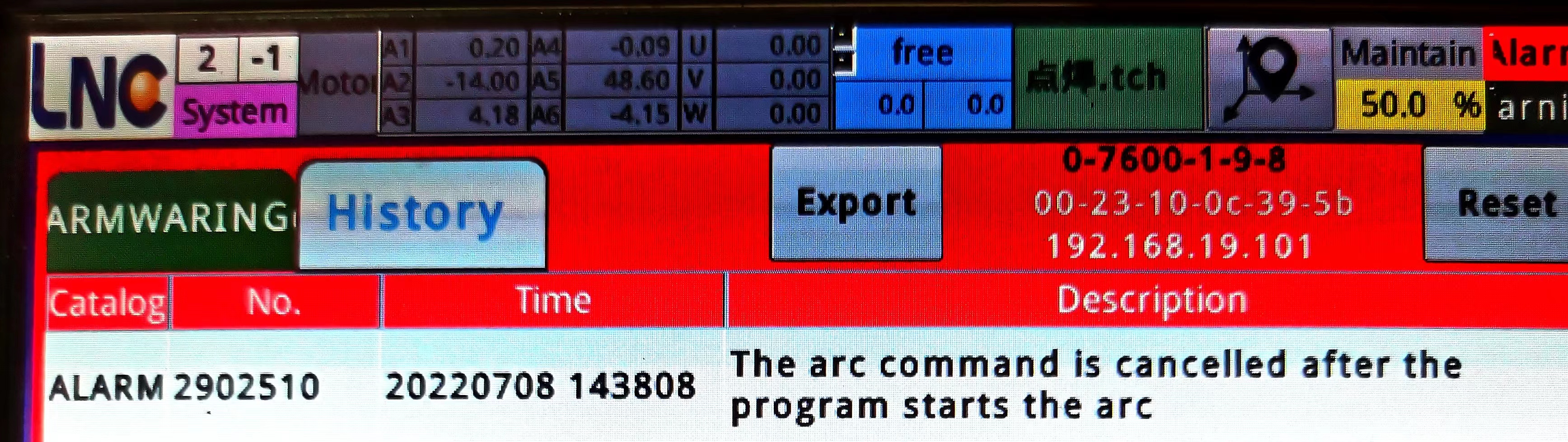
해결방법: 매개변수 시간이 움직이지 않는 시간 설정에 문제가 있는지 확인하고, 용접 토치가 움직였는지 확인하세요.
2. 용접 중 아크 단선이 발생합니다.
이유:
1. 용접 와이어가 작업물에 닿지 않을 경우 아크 차단 알람이 발생합니다.
처리 방법: 용접 와이어와 모재의 위치를 조정하여 용접 과정에서 용접 와이어가 모재에 완전히 접촉하도록 합니다. (단, 모재에 너무 가까이 위치하면 모재를 관통하여 용접될 수 있으므로 주의하십시오.)
2. 불합리한 용접 경로로 인해 충돌로 인해 총 헤드가 자동으로 상승합니다.
해결 방법: 용접 경로 재설정
3. 용접기의 양극선과 음극선의 접촉이 불량합니다.
치료방법 : 양극선, 음극선의 배선상태 확인
3. 용접 후 아크종료 불량의 원인
1. 아크 불량, 신호 검출 오류
원인: 용접기가 로봇으로부터 신호를 받지 못해 로봇이 아크를 닫지 못했습니다.
접근하다:
(1) 설정 매개변수가 적정한지 확인
(2) IO 신호를 확인하여 종단점 I 신호가 정상인지 확인한다. I점 신호가 계속 ON이면 정상이다.
(3) 회선에 단락이 있는지, 접지선이 비정상적으로 연결되어 있는지 확인한다.
2. 아크 스트라이크 후 아크 정지 명령이 설정되지 않음

원인 : 티치펜던트에서 이 알람이 발생하는 경우 아크 종료 명령 추가를 잊었는지 확인하세요.
처리방법 : 프로그램 내에서 아크 시작 명령 뒤에 아크 종료 명령을 추가합니다.
이 글에서는 주로 Yunhua 용접 로봇의 용접 공정 중 아크 시작, 아크 차단, 아크 종료 관련 문제를 소개합니다. 사용 중 이러한 문제가 발생할 경우, 해결 방법을 참고할 수 있습니다. 해결되지 않을 경우, 적절한 시기에 Yunhua 기술자에게 문의하십시오.
Yunhua Robot의 일반적인 문제와 해결책을 더 자세히 알고 싶으시다면, Yunhua Robot 공식 계정을 참고하시기 바랍니다.
윈화 용접 로봇은 가스 차폐 용접, 아르곤 아크 용접, 플라즈마 절단, 레이저 용접 등 다기능 용접을 통합한 자동 로봇입니다. 높은 유연성, 뛰어난 적응성, 효율적인 용접 효율, 안정적인 용접 품질을 자랑하며 기계 제조, 자동차 제조, 정밀 전자, 석탄 채굴 등 다양한 분야에서 널리 활용될 수 있습니다.
게시 시간: 2022년 7월 15일



